2. User Documentation¶
2.1. Overview¶
The ns-3 DEFIANCE module is a reinforcement learning (RL) framework for ns-3. It allows the simulation of distributed RL in networks. It can handle single-agent and multi-agent RL scenarios.
The user performs the following steps to carry out the RL experiment:
Implement the network topology and traffic using standard ns-3 code.
To define how observations and reward signals are collected, how actions are executed in the environment and how the agents perform inference and training, subclass from the provided RL-Applications. Abstract classes for the different subtasks are provided via the AgentApplication, ObservationApplication, RewardApplication and ActionApplication. These applications are installed in the simulation via the RlApplicationHelper.
Specify how data is exchanged between these components and specify the communication structure via channels. The lowest level of abstraction our framework proposes is using ChannelInterfaces for this. The framework also provides a CommunicationHelper class to simplify the communication setup.
Finally, use the utilities provided by ns3-ai to interact with the simulation as an RL environment.
Note
An in-depth documentation of the multi-agent interface we added to ns3-ai can be found here. This interface is also used by the DEFIANCE framework. In case you are interested in how the framework functions or think about extending DEFIANCE, we recommend to take a look at these docs or the blog post <https://medium.com/@oliver.zimmermann/reinforcement-learning-in-ns3-part-1-698b9c30c0cd> we wrote about it.
2.2. RL-Applications¶
2.2.1. RlApplication¶
All presented applications inherit from RlApplication. Therefore, all of them can access the following functionality.
2.2.1.1. RlApplicationId¶
A common use case is to identify the RlApplication information has been sent to or received from.
To accomplish this, each RlApplication has a unique identifer, their RlApplicationId.
This ID can be set by passing an RlApplicationId to RlApplication::SetId.
RlApplicationId is a struct consisting of an uint32_t applicationId and an ApplicationType applicationType.
- This introduces four different types of
RlApplication: OBSERVATIONREWARDAGENTACTION
If the provided CommunicationHelper is not used, one must set all RlApplicationIds manually to be able to use inter-application communication.
2.2.2. AgentApplication¶
The AgentApplication is where inference is performed. This code
is an example of a possible implementation followed by an explanation.
1class InferenceAgentApp : public AgentApplication
2{
3public:
4 InferenceAgentApp()
5 : AgentApplication()
6 {
7 };
8
9 ~InferenceAgentApp() override{};
10
11 static TypeId GetTypeId()
12 {
13 static TypeId tid = TypeId("ns3::InferenceAgentApp")
14 .SetParent<AgentApplication>()
15 .SetGroupName("defiance")
16 .AddConstructor<InferenceAgentApp>();
17 return tid;
18 }
19
20 void Setup() override
21 {
22 AgentApplication::Setup();
23 m_observation = GetResetObservation();
24 m_reward = GetResetReward();
25 }
26
27 void OnRecvObs(uint id) override
28 {
29 m_observation = m_obsDataStruct.GetNewestByID(id)
30 ->data->Get("floatObs")
31 ->GetObject<OpenGymBoxContainer<float>>();
32 InferAction();
33 }
34
35 void OnRecvReward(uint id) override
36 {
37 m_reward = m_rewardDataStruct.GetNewestByID(0)
38 ->data->Get("reward")
39 ->GetObject<OpenGymBoxContainer<float>>()
40 ->GetValue(0);
41 }
42
43 Ptr<OpenGymDataContainer> GetResetObservation()
44 {
45 // This method returns the initial observation that is used after resetting the environment.
46 uint32_t shape = 4;
47 std::vector<uint32_t> vShape = {shape};
48 auto obj = CreateObject<OpenGymBoxContainer<float>>(vShape);
49 for(auto i = 0; i < shape; i++ ){obj->AddValue(0);}
50 return obj;
51 }
52
53 float GetResetReward()
54 {
55 // This method returns the initial reward that is used after resetting the environment.
56 return 0.0;
57 }
58
59private:
60 Ptr<OpenGymSpace> GetObservationSpace() override
61 {
62 uint32_t shape = 4;
63 std::vector<uint32_t> vShape = {shape};
64 std::string dtype = TypeNameGet<float>();
65
66 std::vector<float> low = {-4.8 * 2, -INFINITY, -0.418 * 2, -INFINITY};
67 std::vector<float> high = {4.8 * 2, INFINITY, 0.418 * 2, INFINITY};
68
69 return CreateObject<OpenGymBoxSpace>(low, high, vShape, dtype);
70 }
71
72 Ptr<OpenGymSpace> GetActionSpace() override
73 {
74 return MakeBoxSpace<int>(1, 0, 1);
75 }
76};
To implement your own AgentApplication it is necessary to inherit from AgentApplication in order
to access all features provided by our framework. This can be seen in line 1.
The method InferenceAgentApp::GetTypeId (lines 11-18) is mandatory, as it is part of the ns-3 library. Since our
classes inherit from ns3::Object one has to provide this method to allow the usage of ns-3-factories and ns-3-pointers.
InferenceAgentApp::Setup is called at the beginning of the scenario and ensures that all required variables for inference
are initialized. It is adviced to call the parent method (line 22) since it informs the MARL interface about the action and observation-space
provided by InferenceAgentApp::GetObservationSpace and InferenceAgentApp::GetActionSpace.
Aditionally the InferenceAgentApp::Setup method can be used to initialize m_observation and m_reward since
this method should always be called before the first occurence of inference and thereby guarantees that no uninitialized variables will be used for inference.
m_observation and m_reward are two inherited variables from the AgentApplication class.
m_observation is an OpenGymDataContainer that stores the observations used for inference.
m_reward is simply a float value representing the current reward. Both of this variables are passed to the MARL interface when AgentApplication::InferAction is called (line 32).
InferenceAgentApp::OnRecvObs and InferenceAgentApp::OnRecvReward are called when the AgentApplication receives
an observation or reward. The id is the ID of the RlApplication that sent the data. It can be used to retrieve the desired data from m_obsDataStruct or m_rewardDataStruct by calling HistoryContainer::GetNewestByID(id)
(line 29). However, there is no restriction on how to update m_observation or whether InferenceAgentApp::OnRecvObs should be used at all.
Both of the data structures m_obsDataStruct and m_rewardDataStruct are instances of type HistoryContainer. Once a reward
or observation is received, the AgentApplication ensures both are updated accordingly before calling
InferenceAgentApp::OnRecvObs or InferenceAgentApp::OnRecvReward.
In line 32, the method AgentApplication::InferAction is called. As mentioned earlier passes this method all required parameters for inference to the MARL interface. Aditionally, a callback
is passed on that sends the returned action from the Python side to an ActionApplication. Pass the RlApplicationId::applicationId
to AgentApplication::InferAction as in InferAction(id) if the received action should only be send to an specific ActionApplication.
Otherwise the action will be sent to all registered instances. It is not required to call this method in
InferenceAgentApp::OnRecvObs. For example AgentApplication::InferAction could also be called in a method that is scheduled at equally spaced timesteps
or after an ns-3-event. If preferred, it is even possible to call inference outside of the ActionApplication. Since AgentApplication::InferAction is by design protected within AgentApplication, this would require the
usage of OpenGymMultiAgentInterface::NotifyCurrentState and thus thorough testing.
InferenceAgentApp::OnRecvReward is similar to InferenceAgentApp::OnRecvObs in terms of when it is called and its purpose. Both of these
methods allow to aggregate over the data received by multiple RlApplication instances. One example could calculate the min of all rewards sent
by RewardApplication in the method InferenceAgentApp::OnRecvReward.
InferenceAgentApp::GetResetObservation and InferenceAgentApp::GetResetReward are vital after a reset of the environment. Therefore, they must be implemented in the inheriting class. When setting up a scenario without training a Ray agent and no resets, they are optional, yet it is essential to initialize m_observation and m_reward at the beginning of the scenario (e.g. ll.23-24).
The last two important methods are InferenceAgentApp::GetObservationSpace and InferenceAgentApp::GetActionSpace. These methods are mandatory
because they inform the MARL interface about the dimensions of the respective spaces. Information about the different spaces have to
be provided in instances of OpenGymSpace. An exemplary creation of such spaces can be seen in line 62 to 69. These spaces as well as the
OpenGymDataContainer are part of the ns-3-ai library. To reduce the overhead of creating an OpenGymSpace or OpenGymDataContainer,
some useful functions are provided in base-test.h. An example usage of one of these functions can be seen in line 74.
2.2.2.1. Additional Features and Use-Cases¶
2.2.2.1.1. Configure History Containers¶
The length of m_rewardDataStruct and m_obsDataStruct can be changed by setting the attribute MaxRewardHistoryLength
or MaxObservationHistoryLength.
It is also possible to save a timestamp, marking the time of arrival in m_rewardDataStruct and m_obsDataStruct.
If this feature is required, set ObservationTimestamping or RewardTimestamping to true.
More information is given in Data History Container.
2.2.2.1.2. Provide Extra Info¶
To pass extra info to the environment, override the method AgentApplication::GetExtraInfo
/* ... */
private:
std::string m_importantMessage;
std::map<std::string, std::string> GetExtraInfo() override
{
std::map<std::string, std::string> info;
info["agent"] = m_importantMessage;
return info;
}
2.2.2.1.3. Action Delay¶
To simulate the time required to calculate inference, a delay can be set between receiving an action and performing the callback specified for action execution.
/* ... */
private:
std::string m_importantMessage;
Time GetActionDelay() override
{
return Seconds(1);
}
2.2.2.1.4. Override initiateAction and initiateActionForApp¶
After inference took place, either of these methods is invoked with the returned action from the MARL interface.
This method then sends the received message to either all registered ActionApplication or the one that matches remoteAppId.
Overriding this method allows for example to only send over a specific ChannelInterface.
/* in your AgentApplication-class: */
protected:
uint32_t interfaceToUse;
void InitiateActionForApp(uint remoteAppId, Ptr<OpenGymDataContainer> action)
{
SendAction(MakeDictContainer("default", action), remoteAppId, interfaceToUse);
}
2.2.2.1.5. OnRecvFromAgent¶
To specify how an AgentApplication should handle messages from another AgentApplication, override this method.
The method receives a remoteAppId matching the RlApplicationId::applicationId of the AgentApplication that send the data and
the message itself as a Ptr<OpenGymDictContainer>. Here is an example for this:
/* in your AgentApplication-class: */
protected:
uint32_t agentOfInterest;
void OnRecvFromAgent(uint remoteAppId, Ptr<OpenGymDictContainer> payload)
{
if(remoteAppId == agentOfInterest)
{
message = payload->Get("parameter")
->GetObject<OpenGymBoxContainer<float>>()
->GetValue(0);
}
}
If desired, a new HistoryContainer can be added to the class which can be used to store and retrieve the received agent messages in a similar fashion as the observations and rewards.
2.2.3. ObservationApplication¶
The main purpose of the ObservationApplication is to send observations to the agent.
Therefore, the class is equipped with the methods ObservationApplication::RegisterCallbacks and ObservationApplication::Send.
To implement an ObservationApplication, create a child class that inherits from
ObservationApplication. This also requires overriding GetTypeId in a similar fashion as seen earlier in the AgentApplication example.
2.2.3.1. ObservationApplication::RegisterCallbacks¶
This method allows registration of callbacks to trace sources. This ensures the ObservationApplication
is always informed when a value that should be observed changes.
class YourImplementation : public ObservationApplication{
public:
/* ... */
void
RegisterCallbacks() override
{
DynamicCast<YourNode>(GetNode())->m_reportYourTrace.ConnectWithoutContext(
MakeCallback(&YourImplementation::Observe, this));
}
void Observe(/*values provided by the trace source*/)
{
/* send observation or wait for more observation */
}
}
Note
It can be tricky to access the required trace source inside the ObservationApplication class, especially if the trace source is not provided by ns-3. In this example,
the costume trace source is accessed by inheriting the Node class and adding the
trace source as a class member. All ns3::Application instances can access the node they are
installed on with GetNode. Alternatively, trace sources can be accessed by a
ns-3 path. Look into the ns-3 documentation for more information.
2.2.3.2. ObservationApplication::Send¶
Once the ObservationApplication is satisfied with the observations, it can send these observations to registered instances of AgentApplication.
This functionality is offered by the base class. The observations have to be wrapped into an OpenGymDictContainer. If an observation
should only be sent to a specific agent, pass the RlApplicationId to ObservationApplication::Send. Furthermore, the ID of the ChannelInterface
can be provided. If not provided, the observation is sent to all registered instances.
class YourImplementation : public ObservationApplication{
public:
/* ... */
void Observe(uint32_t value)
{
/*create OpenGymDataContainer */
Send(/*OpenGymDictContainer*/);
// or
Send(/*OpenGymDictContainer*/, remoteId, interfaceId);
}
}
2.2.4. RewardApplication¶
The RewardApplication is in its functionality similar to ObservationApplication since both classes inherit from the same base class.
A reward should be sent to an instance of AgentApplication once a relevant event is triggered. To
accomplish that the RewardApplication::Send is provided. It is required to wrap all reward information into an OpenGymDictContainer.
class YourImplementation : public RewardApplication{
public:
/* ... */
void
RegisterCallbacks() override
{
DynamicCast<YourNode>(GetNode())->m_reportYourTrace.ConnectWithoutContext(
MakeCallback(&YourImplementation::ObserveReward, this));
}
void ObserveReward(/*values provided by the trace source*/)
{
/*create OpenGymDataContainer */
Send(/*OpenGymDictContainer*/);
// or
Send(/*OpenGymDictContainer*/, remoteID, interfaceId);
}
}
2.2.5. ActionApplication¶
The ActionApplication receives actions and executes them. Therefore, upon receiving an action from an AgentApplication, the virtual method ActionApplication::ExecuteAction is triggered.
To specify what action should be performed, override the ActionApplication::ExecuteAction in a child class.
2.2.5.1. ActionApplication::ExecuteAction¶
In this method, two parameters are accessible. remoteAppId is the RlApplicationId of the AgentApplication that sent
the action. action is an OpenGymDictContainer that contains the sent action out of the action space.
An exemplary retrieval of the actual content of action is provided in line 19. action->Get("default") returns an
OpenGymDataContainer. Therefore, it is necessary to dynamically cast this OpenGymDataContainer to the type that was sent by the AgentApplication (e.g. with GetObject<OpenGymBoxContainer<int>>()). If the content of action at key: "default" doesn’t
match the type passed to GetObject, a null pointer will be returned even if its only a mismatch in the provided data type
for OpenGymBoxContainer.
Note
Make sure that the OpenGymDictContainer action actually contains the key passed by action->Get("default").
The AgentApplication::InitiateAction will always wrap the received action from the MARL interface into an OpenGymDictContainer
with the key "default". However, if this method was overridden in a child class, a different key is possible.
1class YourActionApp : public ActionApplication
2{
3public:
4 YourActionApp(){};
5 ~YourActionApp() override{};
6
7 static TypeId GetTypeId()
8 {
9 static TypeId tid = TypeId("ns3::YourActionApp")
10 .SetParent<ActionApplication>()
11 .SetGroupName("defiance")
12 .AddConstructor<YourActionApp>();
13 return tid;
14 }
15
16 void ExecuteAction(uint32_t remoteAppId, Ptr<OpenGymDictContainer> action) override
17 {
18 // auto m_objectActionIsPerformedOn = DynamicCast<objectActionIsPerformedOn>(GetNode());
19 auto act = action->Get("default")->GetObject<OpenGymBoxContainer<int>>()->GetValue(0);
20
21 m_objectActionIsPerformedOn->SetValue(acc);
22 }
23
24 void SetObservationApp(Ptr<ActionObject> object)
25 {
26 m_objectActionIsPerformedOn = object;
27 }
28
29private:
30 Ptr<ActionObject> objectActionIsPerformedOn;
31};
To perform the action, the ActionApplication needs a reference to the object it perfoms the action on.
One solution would be to pass it to the application as seen in line 24-27. Alternatively, the ActionApplication could access the node it is installed on.
2.2.6. Communication between RL-Applications¶
2.2.6.1. Add interfaces¶
To properly use the RL applications, connect them to one another via the ChannelInterface.
The RlApplication interface provides the method RlApplication::AddInterface to register a ChannelInterface.
Two applications can be connected over multiple instances of ChannelInterface, enabling potential multipath functionality. To index the different ChannelInterface between
two applications, an interfaceId has to be provided. RlApplicationId in combination with the interfaceId represents an
unique identifer for a connection between two instances of RlApplication.
AddInterface also sets up necessary callbacks for receiving messages.
1//code to create your agent
2RlApplicationHelper helper(TypeId::LookupByName("ns3::YourAgentClass"));
3helper.SetAttribute("StartTime", TimeValue(Seconds(0)));
4helper.SetAttribute("StopTime", TimeValue(Seconds(10)));
5RlApplicationContainer agentApps = helper.Install(agentNode);
6
7//code to create your observationApp
8helper.SetTypeId("ns3::YourObservationApp");
9RlApplicationContainer observationApps = helper.Install(obsNode);
10
11RlApplicationId remoteIdObservationApp = DynamicCast<YourObservationApp>(observationApps.Get(0))->GetId();
12Ptr<YourAgentClass> agent = DynamicCast<YourAgentClass>(agentApps.Get(0));
13uint interfaceAtAgentId = agent->AddInterface(remoteIdObservationApp, ptrToChannelInterface);
14
15RlApplicationId remoteAgentId = DynamicCast<YourAgentClass>(agentApps.Get(0))->GetId();
16Ptr<YourObservationApp> obsApp = DynamicCast<YourObservationApp>(observationApps.Get(0));
17uint interfaceAtObservationId = obsApp->AddInterface(remoteAgentId, ptrToChannelInterface);
Note that the functionality of this method is only provided for foreseen connections of the framework. For example it is necessary that
an AgentApplication can exchange data with all other types of RlApplications. Therefore the call of AgentApplication::AddInterface
will succeed as long as the provided RlApplicationId::ApplicationType matches any of the following:
OBSERVATION
REWARD
AGENT
ACTION
However, if one tries to add a ChannelInterface to an ObservationApplication that is connected to another ObservationApplication, the method
would result in an error because the exchange between two ObservationApplication is deliberately excluded in the design of ns3-defiance.
When adding the ChannelInterface, the application can derive the ApplicationType from the RlApplicationId.
This allows the application to properly handle the connection.
After registering the ChannelInterface, the RlApplication is ready to send.
2.2.6.2. Send¶
Call this method to send data over a registered ChannelInterface. Note that the different RlApplications often wrap
the RlApplication::Send for general use cases. Therefore, refrain from using RlApplication::Send and use the respective appropiate method offered by each application instead. These methods
often ensure additional necessary prerequisites for proper communication (e.g. registering callbacks).
Even though these wrapped methods differ in their functionality they are all called in a similar manner.
There are always 3 arguments: Ptr<OpenGymDictContainer> data, uint32_t appId, uint32_t interfaceIndex.
The first argument is required - the data that is supposed to be sent. The second argument is the
appId. If provided, the data will only be sent to the RlApplication that has a matching RlApplicationId::applicationId.
The third argument the interfaceIndex can be specified alongside the RlApplicationId::applicationId. This ensures that only a specific
ChannelInterface is used. The index of an interface is returned by the AddInterface method.
If the interfaceIndex is not set, all interfaces between the two applications are used.
Similarly, if the appId is not set the data is sent to all registered applications of that type over all interfaces.
// method to send actions from agent to action app
uint interfaceIdActionApp = agentApp->AddInterface(remoteActionId, ptrToChannelInterface);
Ptr<OpenGymDictContainer> action = /* create DictContainer */
//send to all
SendAction(action);
//send to specific application
SendAction(action, remoteActionId);
//send to specific application over specific channelInterface
SendAction(action, remoteActionId, interfaceIdActionApp);
2.2.6.3. AgentApplication Communication¶
The AgentApplication can communicate with applications of any RlApplicationId::ApplicationType:
OBSERVATION
REWARD
AGENT
ACTION
See Add interfaces for more information on how to set it up.
To fulfill its functionality, the AgentApplication is equipped with two methods - SendAction and SendToAgent.
They are invoked as described in Send. SendAction only sends to applications of type ACTION, while
SendToAgent only sends to applications of type AGENT.
2.2.6.4. RewardApplication Communication and ObservationApplication Communication¶
Both applications only allow communication to applications of type AGENT. See Add interfaces on how to add interfaces.
The interface of RewardApplication and ObservationApplication offers a Send method (through their parent class DataCollectorApplication)
that works as described in Send. The passed data should be used by the agent to determine the reward or update its observation.
2.2.6.5. ActionApplication Communication¶
The ActionApplication only allows applications of type AGENT to be added. See Add interfaces on how to add interfaces.
It doesn’t wrap the Send method because it is not supposed to send, but only receive.
2.3. Data History Container¶
The data history container is used for storage of data in the AgentApplication, specifically the latest observations received from ObservationApplications and latest rewards received from RewardApplications. When creating the history container, specify how much data it should store before deleting old data. It is possile to also specify whether the ns-3 simulation time should be tracked with every data entry. If the usage of another history container is desired somewhere else, create a new instance of HistoryContainer. This can be useful for e.g. inter-agent communication.
The data container generally accepts every form of OpenGymDictContainers, but when the included aggregation functions like average, minimum or maximum over the last n entries are used, the aggregation functions will assume OpenGymDictContainers with OpenGymBoxContainers inside for them to work.
By way of the observation history container: It has an individual queue for each ObservationApplication that is connected to the AgentApplication. It also consists of a queue that contains all observations across ObservationApplications. The same applies to the reward history container, but with RewardApplications.
In order to add data to the history container, call the method ns3::HistoryContainer::Push(ns3::Ptr<ns3::OpenGymDictContainer> data, uint id), which will add the data to the queue specified through id. This doesn’t need to be done manually though, as the AgentApplication will automatically add the data to the history container when received from the ObservationApplications and RewardApplications. In order to do the same with agent messages, define a new history container and fill it accordingly in a method derived from AgentApplication::OnRecvFromAgent.
In order to get data from the history container, call the method HistoryContainer::GetNewestByID(uint id, uint n), which will return the data from the queue specified through id. If necessary, use n to specify the number of entries to retrieve. If the newest data across all queues is needed, call the method HistoryContainer::GetNewestOfCombinedHistory(uint n), which will return the latest n entries across all queues. Note that this might not retrieve evenly distributed numbers of entries from the queues, but rather the overall newest entries because different queues might be filled at different rates.
To get the average, minimum or maximum over the last n entries, call the method HistoryContainer::AggregateNewest(uint id, uint n), which will return the average of the last n entries from the queue specified through id. This way, we can access the average, minimum or maximum of the last n entries for each key of the OpenGymDictContainer.
It makes sense to retreive the data from the history container in the AgentApplication after the AgentApplication has received data from the ObservationApplications and RewardApplications. Thus, the methods void OnRecvObs(uint id) override and void OnRecvRew(uint id) override are the right place to retrieve the latest observations and rewards, respectively, or to do other calculations.
For example, retrieve the newest observation from the history container with ID 0 like this:
void OnRecvObs(uint id) override
{
auto obs = m_obsDataStruct.GetNewestByID(0)
->data->Get("floatObs")
->GetObject<OpenGymBoxContainer<float>>();
m_observation = obs;
}
The following code creates a mapping of AggregatedInfo of the last 10 entries for each key of the OpenGymDictContainer, providing access to average, minimum and maximum values:
auto agg = m_obsDataStruct.AggregateNewest(0, 10);
auto min = agg["floatObs"].GetMin();
auto max = agg["floatObs"].GetMax();
auto avg = agg["floatObs"].GetAvg();
2.4. ChannelInterface¶
The channel interface is an abstraction for the communication between RL applications. It is used to send data as described in Send.
2.4.1. Overview¶
The channel interface is an abstracted communication channel for RLApplications. It provides an asynchronous, non-blocking API and uses callback mechanisms similar to the ns-3 Socket API. It also handles serialization and deserialization of outgoing and incoming data.
The channel interface is designed to simplify communication between RLApplications and eliminate the overhead of creating and connecting sockets for each application. Read more about it in the Design Documentation. Additionally, the channel interface is extendable, allowing to create custom channel interfaces for other communication protocols.
The recommended way to connect and use channel interfaces is with the CommunicationHelper which handles the creation and connection process between RLApplications. Find more information in the Helper Documentation.
The channel interface sends and receives OpenGymBoxContainer. This makes it primarily suited for sharing observations, rewards, and actions between RLApplications, adhering to the OpenAI Gym API. However, due to the versatility of the OpenGymBoxContainer, it can be used to share arbitrary data between applications.
We provide two different channel interface implementations. Please note that different channel interface implementations are not interconnectable.
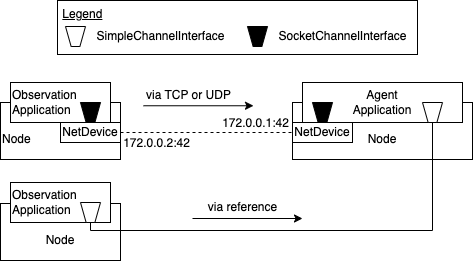
Communication via SimpleChannelInterface and SocketChannelInterface¶
2.4.2. Usage¶
First, create two ChannelInterfaces, one for each RLApplication that will communicate with each other. Connect the two ChannelInterface objects using the ChannelInterface::Connect method. Afterwards, send data to the remote RLApplication using ChannelInterface::Send.
To handle received data, add a callback function to the channel interface with the ChannelInterface::ConnectAddRecvCallback method. This callback function will be called when new data arrives, with the deserialized data as an OpenGymBoxContainer.
If a callback function is no longer needed, remove it using the ChannelInterface::ConnectRemoveRecvCallback method. Add as many callback functions as needed. They will be called in the order they were added.
Disconnect the two ChannelInterface objects with the ChannelInterface::Disconnect method. For that, provide the specific callback function that shall be remove.
Check the connection status of the channel interface using ChannelInterface::GetConnectionStatus. It returns an element of the following enum:
enum ConnectionStatus
{
DISCONNECTED,
CONNECTING,
CONNECTED,
};
2.4.3. SimpleChannelInterface¶
The SimpleChannelInterface simulates communication between RLApplications without using the underlying network simulation. It is primarily intended for debugging or simulating communication without the overhead of a full network simulation. It does not provide a realistic simulation of network communication and should not be used for performance evaluation. However, set a network delay to simulate network latency if needed.
Here is an example of how to use the SimpleChannelInterface:
// the simple interface does not need any configuration or parameters
auto interfaceSimple0 = CreateObject<SimpleChannelInterface>();
auto interfaceSimple1 = CreateObject<SimpleChannelInterface>();
// create a callback function which prints the contents of the OpenGymDictContainer
auto recvCallback = Callback<void, Ptr<OpenGymDictContainer>>(
[](Ptr<OpenGymDictContainer> msg) { NS_LOG_INFO(msg->Get("box")); });
// add the callback function to the channel interfaces, both should just print the received data
interfaceSimple0->AddRecvCallback(recvCallback);
interfaceSimple1->AddRecvCallback(recvCallback);
// add a simple network delay of 0.1 seconds
interfaceSimple0->SetPropagationDelay(Seconds(0.1));
interfaceSimple1->SetPropagationDelay(Seconds(0.1));
// connect the two channel interfaces with each other in the simulation after 0.1 seconds
Simulator::Schedule(Seconds(0.1),
&SimpleChannelInterface::Connect,
interfaceSimple0,
interfaceSimple1);
/* helper method to creates a OpenGymDictContainer
with a OpenGymBoxContainer named "box" with a float value */
Ptr<OpenGymDictContainer>
CreateTestMessage(float value)
{
Ptr<OpenGymDictContainer> msg = Create<OpenGymDictContainer>();
Ptr<OpenGymBoxContainer<float>> box = Create<OpenGymBoxContainer<float>>();
box->AddValue(value);
msg->Add("box", box);
return msg;
}
// send the OpenGymDictContainer from interfaceSimple0 to interfaceSimple1 after 1 second */
Simulator::Schedule(Seconds(1),
&SimpleChannelInterface::Send,
interfaceSimple0,
CreateTestMessage(0));
This example creates two SimpleChannelInterface objects and connects them. After 1 second, it sends a message from one interface to the other. Due to the 0.1 second network delay, the message is printed by the receiving interface after 1.1 seconds.
2.4.4. SocketChannelInterface¶
The SocketChannelInterface uses sockets to communicate between RLApplications. It utilizes ns-3 sockets under the hood and is the recommended way to simulate realistic network communication.
The network scenario and topology should ensure that the RLApplications can communicate with each other, for example, via the Internet or a local network. The channel interface itself does not handle the network communication; it only provides the API for communication.
If other communication methods are required, create a custom channel interface and implement it accordingly.
Here is an example of how to use the SocketChannelInterface:
// create nodes
NodeContainer nodes;
nodes.Create(2);
// create a point-to-point helper
PointToPointHelper p2p;
p2p.SetDeviceAttribute("DataRate", StringValue("5Mbps"));
p2p.SetChannelAttribute("Delay", StringValue("2ms"));
// create devices and install them on nodes
NetDeviceContainer devices;
devices.Add(p2p.Install(nodes.Get(0), nodes.Get(1)));
// assign IP addresses
InternetStackHelper internet;
internet.Install(nodes);
Ipv4AddressHelper address;
address.SetBase("10.1.1.0", "255.255.255.0");
Ipv4InterfaceContainer interfaces = address.Assign(devices);
// get the protocol type id for the protocol we want to use
auto tcpProtocol = TcpSocketFactory::GetTypeId();
// create the interfaces with the nodes and the protocol
Ptr<SocketChannelInterface> interfaceTcp0_1 =
CreateObject<SocketChannelInterface>(nodes.Get(0), interfaces.GetAddress(0), tcpProtocol);
Ptr<SocketChannelInterface> interfaceTcp1_0 =
CreateObject<SocketChannelInterface>(nodes.Get(1), interfaces.GetAddress(1), tcpProtocol);
// create a callback function which prints the contents of the OpenGymDictContainer
auto recvCallback = Callback<void, Ptr<OpenGymDictContainer>>(
[](Ptr<OpenGymDictContainer> msg) { NS_LOG_INFO(msg->Get("box")); });
// add the callback function to the channel interfaces, both should just print the received data
interfaceTcp0_1->AddRecvCallback(recvCallback);
interfaceTcp1_0->AddRecvCallback(recvCallback);
// connect the two channel interfaces with each other in the simulation after 0.1 seconds
Simulator::Schedule(Seconds(0.1),
&SocketChannelInterface::Connect,
interfaceTcp0_1A,
interfaceTcp1_0);
/* helper method to creates a OpenGymDictContainer
with a OpenGymBoxContainer named "box" with a float value */
Ptr<OpenGymDictContainer>
CreateTestMessage(float value)
{
Ptr<OpenGymDictContainer> msg = Create<OpenGymDictContainer>();
Ptr<OpenGymBoxContainer<float>> box = Create<OpenGymBoxContainer<float>>();
box->AddValue(value);
msg->Add("box", box);
return msg;
}
// send the OpenGymDictContainer from interfaceTcp0_1 to interfaceTcp1_0 after 1 seconds */
Simulator::Schedule(Seconds(1),
&SocketChannelInterface::Send,
interfaceUdp0_1,
CreateTestMessage(1));
This example creates two SocketChannelInterface and connects them. After 1 second, it sends a message from one interface to the other and prints the received message after approximately 1.02 seconds (because of the 20ms network delay).
2.4.5. Custom Channel Interface¶
If necessary, implement and use a custom channel interface to use alternative communication protocols or methods for communication between RLApplications.
To create a custom channel interface, inherit from the abstract base class ChannelInterface and implement its corresponding methods.
2.5. Helper Classes¶
2.5.1. RlApplicationHelper¶
As previously introduced, the DEFIANCE framework is mainly structured around user specific RlApplications. They are derived from their specific base classes (e.g. AgentApplication) and communicate relevant information with one another during the simulation.
To simplify the creation of their instances, the RlApplicationHelper class is provided. As with the typical helper classes already present in ns-3, it makes the creation of the applications more intuitive.
The following example demonstrates how the RlApplicationHelper can be used.
RlApplicationHelper helper(TypeId::LookupByName("ns3::MyObservationApp"));
// the helper allows to set attributes for the applications
// this is persistent for all the applications that will be created afterwards
helper.SetAttribute("StartTime", TimeValue(Seconds(0)));
helper.SetAttribute("StopTime", TimeValue(Seconds(10)));
RlApplicationContainer observationApps = helper.Install(myNodes1);
helper.SetTypeId("ns3::MyRewardApp");
RlApplicationContainer rewardApps = helper.Install(myNodes2);
helper.SetTypeId("ns3::MyActionApp");
RlApplicationContainer actionApps = helper.Install(myNodes3);
helper.SetTypeId("ns3::MyAgentApp");
RlApplicationContainer agentApps = helper.Install(myNodes4);
This example shows the main features of the RlApplicationHelper. First of all, it wraps the created application instances in an RlApplicationContainer. This container can be used like the standard ns-3 ApplicationContainer to access or iterate over the applications but does not require to cast the applications each time that DEFIANCE-specific functionality is required. Secondly, the helper allows to set attributes for the applications. This enables work with the TypeId system, which makes it easy to set default arguments and to work with command line arguments. In the example above, the helper is used to create different types of applications but sets the same start and stop time for all of them.
Note
The RlApplicationHelper is not limited to the applications that are provided by the DEFIANCE framework. It can be used with any application that is derived from the RlApplication class.
2.5.2. CommunicationHelper¶
The natural extension to the RlApplicationHelper is the CommunicationHelper. It can work with RlApplicationContainers to create communication channels between the applications and configure them accordingly. The CommunicationHelper simplifies this procedure and reduces the risks of bugs.
First, create an instance of CommunicationHelper and set the different applications:
1CommunicationHelper commHelper = CommunicationHelper();
2
3commHelper.SetObservationApps(observationApps);
4commHelper.SetAgentApps(agentApps);
5commHelper.SetRewardApps(rewardApps);
6commHelper.SetActionApps(actionApps);
7commHelper.SetIds();
The different Set methods expect an object of type RlApplicationContainer. See chapter ApplicationHelper for more information on how to create one. After the helper received all RlApplicationContainers, the IDs of these applications
need to be assigned (line 7). The IDs are used to identify the instances of RlApplication and are required for the next step.
Once the IDs are assigned, the actual connection can be configured.
This can be done by passing a vector of type CommunicationPair to the CommunicationHelper.
To create an instance of CommunicationPair, the IDs of the two RlApplications and a CommunicationAttributes object have to be provided.
The CommunicationAttributes object describes the type of connection. If no argument is passed, a SimpleChannelInterface is created.
To create a socket connection via TCP or UDP, a SocketCommunicationAttributes object with TypeId protocol set accordingly can be passed as CommunicationAttributes.
The following code is a simple example that creates CommunicationPairs of different types.
1// UDP
2CommunicationPair actionCommPair = {
3 actionApps.GetId(0),
4 agentApps.GetId(0),
5 SocketCommunicationAttributes{"7.0.0.2", "1.0.0.2", UdpSocketFactory::GetTypeId()}};
6
7//TCP
8CommunicationPair observationCommPair = {
9 observationApps.GetId(0),
10 agentApps.GetId(0),
11 SocketCommunicationAttributes{"7.0.0.2", "1.0.0.2", TcpSocketFactory::GetTypeId()}};
12
13//SIMPLE
14CommunicationPair actionCommPair = {actionApps.GetId(0),
15 agentApps.GetId(0),
16 {}};
The method GetId(i) allows to retrieve the RlApplicationId by passing the index i to the RlApplicationContainer (as used in e.g. line 3–4).
When creating SocketCommunicationAttributes, the passed IP addresses have to match the addresses of the node the application is installed on.
Once these CommunicationPairs are created, collect them in a vector and pass it to CommunicationHelper::AddCommunication as a parameter.
Finally, the configuration can be finished by calling Configure on the CommunicationHelper. Now all channel interfaces are created accordingly, ready for sending and receiving data.
An explanation of the Configure method can be found in section Helper of the design documentation.