ChannelInterface¶
The channel interface is an abstraction for the communication between RL applications. It is used to send data as described in `Send`_.
Overview¶
The channel interface is an abstracted communication channel for RLApplications. It provides an asynchronous, non-blocking API and uses callback mechanisms similar to the ns-3 Socket API. It also handles serialization and deserialization of outgoing and incoming data.
The channel interface is designed to simplify communication between RLApplications and eliminate the overhead of creating and connecting sockets for each application. Read more about it in the Design Documentation. Additionally, the channel interface is extendable, allowing to create custom channel interfaces for other communication protocols.
The recommended way to connect and use channel interfaces is with the CommunicationHelper which handles the creation and connection process between RLApplications. Find more information in the Helper Documentation.
The channel interface sends and receives OpenGymBoxContainer. This makes it primarily suited for sharing observations, rewards, and actions between RLApplications, adhering to the OpenAI Gym API. However, due to the versatility of the OpenGymBoxContainer, it can be used to share arbitrary data between applications.
We provide two different channel interface implementations. Please note that different channel interface implementations are not interconnectable.
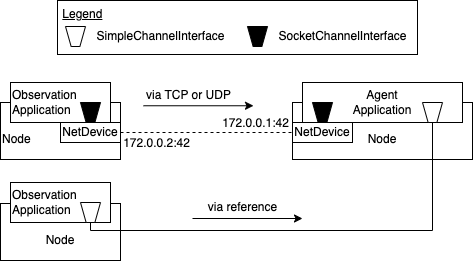
Communication via SimpleChannelInterface and SocketChannelInterface¶
Usage¶
First, create two ChannelInterfaces, one for each RLApplication that will communicate with each other. Connect the two ChannelInterface objects using the ChannelInterface::Connect method. Afterwards, send data to the remote RLApplication using ChannelInterface::Send.
To handle received data, add a callback function to the channel interface with the ChannelInterface::ConnectAddRecvCallback method. This callback function will be called when new data arrives, with the deserialized data as an OpenGymBoxContainer.
If a callback function is no longer needed, remove it using the ChannelInterface::ConnectRemoveRecvCallback method. Add as many callback functions as needed. They will be called in the order they were added.
Disconnect the two ChannelInterface objects with the ChannelInterface::Disconnect method. For that, provide the specific callback function that shall be remove.
Check the connection status of the channel interface using ChannelInterface::GetConnectionStatus. It returns an element of the following enum:
enum ConnectionStatus
{
DISCONNECTED,
CONNECTING,
CONNECTED,
};
SimpleChannelInterface¶
The SimpleChannelInterface simulates communication between RLApplications without using the underlying network simulation. It is primarily intended for debugging or simulating communication without the overhead of a full network simulation. It does not provide a realistic simulation of network communication and should not be used for performance evaluation. However, set a network delay to simulate network latency if needed.
Here is an example of how to use the SimpleChannelInterface:
// the simple interface does not need any configuration or parameters
auto interfaceSimple0 = CreateObject<SimpleChannelInterface>();
auto interfaceSimple1 = CreateObject<SimpleChannelInterface>();
// create a callback function which prints the contents of the OpenGymDictContainer
auto recvCallback = Callback<void, Ptr<OpenGymDictContainer>>(
[](Ptr<OpenGymDictContainer> msg) { NS_LOG_INFO(msg->Get("box")); });
// add the callback function to the channel interfaces, both should just print the received data
interfaceSimple0->AddRecvCallback(recvCallback);
interfaceSimple1->AddRecvCallback(recvCallback);
// add a simple network delay of 0.1 seconds
interfaceSimple0->SetPropagationDelay(Seconds(0.1));
interfaceSimple1->SetPropagationDelay(Seconds(0.1));
// connect the two channel interfaces with each other in the simulation after 0.1 seconds
Simulator::Schedule(Seconds(0.1),
&SimpleChannelInterface::Connect,
interfaceSimple0,
interfaceSimple1);
/* helper method to creates a OpenGymDictContainer
with a OpenGymBoxContainer named "box" with a float value */
Ptr<OpenGymDictContainer>
CreateTestMessage(float value)
{
Ptr<OpenGymDictContainer> msg = Create<OpenGymDictContainer>();
Ptr<OpenGymBoxContainer<float>> box = Create<OpenGymBoxContainer<float>>();
box->AddValue(value);
msg->Add("box", box);
return msg;
}
// send the OpenGymDictContainer from interfaceSimple0 to interfaceSimple1 after 1 second */
Simulator::Schedule(Seconds(1),
&SimpleChannelInterface::Send,
interfaceSimple0,
CreateTestMessage(0));
This example creates two SimpleChannelInterface objects and connects them. After 1 second, it sends a message from one interface to the other. Due to the 0.1 second network delay, the message is printed by the receiving interface after 1.1 seconds.
SocketChannelInterface¶
The SocketChannelInterface uses sockets to communicate between RLApplications. It utilizes ns-3 sockets under the hood and is the recommended way to simulate realistic network communication.
The network scenario and topology should ensure that the RLApplications can communicate with each other, for example, via the Internet or a local network. The channel interface itself does not handle the network communication; it only provides the API for communication.
If other communication methods are required, create a custom channel interface and implement it accordingly.
Here is an example of how to use the SocketChannelInterface:
// create nodes
NodeContainer nodes;
nodes.Create(2);
// create a point-to-point helper
PointToPointHelper p2p;
p2p.SetDeviceAttribute("DataRate", StringValue("5Mbps"));
p2p.SetChannelAttribute("Delay", StringValue("2ms"));
// create devices and install them on nodes
NetDeviceContainer devices;
devices.Add(p2p.Install(nodes.Get(0), nodes.Get(1)));
// assign IP addresses
InternetStackHelper internet;
internet.Install(nodes);
Ipv4AddressHelper address;
address.SetBase("10.1.1.0", "255.255.255.0");
Ipv4InterfaceContainer interfaces = address.Assign(devices);
// get the protocol type id for the protocol we want to use
auto tcpProtocol = TcpSocketFactory::GetTypeId();
// create the interfaces with the nodes and the protocol
Ptr<SocketChannelInterface> interfaceTcp0_1 =
CreateObject<SocketChannelInterface>(nodes.Get(0), interfaces.GetAddress(0), tcpProtocol);
Ptr<SocketChannelInterface> interfaceTcp1_0 =
CreateObject<SocketChannelInterface>(nodes.Get(1), interfaces.GetAddress(1), tcpProtocol);
// create a callback function which prints the contents of the OpenGymDictContainer
auto recvCallback = Callback<void, Ptr<OpenGymDictContainer>>(
[](Ptr<OpenGymDictContainer> msg) { NS_LOG_INFO(msg->Get("box")); });
// add the callback function to the channel interfaces, both should just print the received data
interfaceTcp0_1->AddRecvCallback(recvCallback);
interfaceTcp1_0->AddRecvCallback(recvCallback);
// connect the two channel interfaces with each other in the simulation after 0.1 seconds
Simulator::Schedule(Seconds(0.1),
&SocketChannelInterface::Connect,
interfaceTcp0_1A,
interfaceTcp1_0);
/* helper method to creates a OpenGymDictContainer
with a OpenGymBoxContainer named "box" with a float value */
Ptr<OpenGymDictContainer>
CreateTestMessage(float value)
{
Ptr<OpenGymDictContainer> msg = Create<OpenGymDictContainer>();
Ptr<OpenGymBoxContainer<float>> box = Create<OpenGymBoxContainer<float>>();
box->AddValue(value);
msg->Add("box", box);
return msg;
}
// send the OpenGymDictContainer from interfaceTcp0_1 to interfaceTcp1_0 after 1 seconds */
Simulator::Schedule(Seconds(1),
&SocketChannelInterface::Send,
interfaceUdp0_1,
CreateTestMessage(1));
This example creates two SocketChannelInterface and connects them. After 1 second, it sends a message from one interface to the other and prints the received message after approximately 1.02 seconds (because of the 20ms network delay).
Custom Channel Interface¶
If necessary, implement and use a custom channel interface to use alternative communication protocols or methods for communication between RLApplications.
To create a custom channel interface, inherit from the abstract base class ChannelInterface and implement its corresponding methods.